|
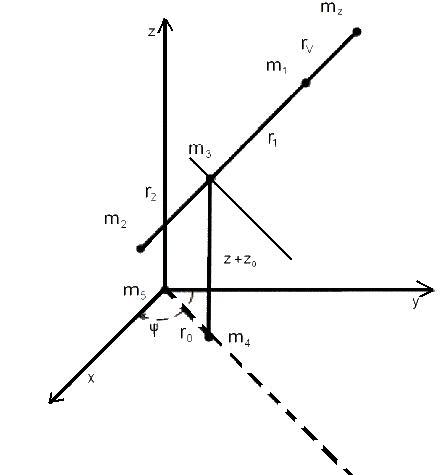
Robot - manipulátor
|
|
Matematický model robota je daný nelineárnymi pohybovými diferenciálnymi rovnicami, ktorých počet je rovný počtu stupňov voľnosti. Tieto nelineárne diferenciálne rovnice je možné získať z Langrangeových rovníc druhého druhu. Model sa používa na simulačné overenie sledovania referenčných trajektórií algoritmom spätnoväzobného optimálneho riadenia, pričom je použitý klasický a inteligentný prístup návrhu pomocou neurónových sietí.
|

|
|
|

