|
Portálový žeriav
|
|
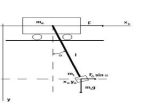
Portálový žeriav je nelineárny MIMO (multi input / multi output) dynamický systém s premenlivými parametrami. Portálový žeriav sa skladá z viacerých subsystémov, ktoré navzájom na seba vplývajú a to: mačka, servopohon a prevodovka. Portálový žeriav je riadený rôznymi algoritmami stavového riadenia (kvadratické optimálne riadenie, robustné riadenie a modálne riadenie).
|

|
|
|

